

當(dāng)前,自動(dòng)駕駛可分為兩大應(yīng)用場景,一是開放式道路上的乘用車,二是封閉、半封閉環(huán)境下的功能型汽車。受技術(shù)、倫理道德以及法律限制等影響,在開放道路上無人駕駛?cè)嫔逃眠€距離甚遠(yuǎn),但在一些封閉、半封閉的應(yīng)用環(huán)境下,其影響已經(jīng)無處不在。如礦山、港口、景區(qū)、環(huán)衛(wèi)等應(yīng)用場景下的“低速無人車”已經(jīng)穩(wěn)步著陸。
除乘用車市場外,相對開放道路的自動(dòng)駕駛而言,低速無人駕駛領(lǐng)域?qū)す饫走_(dá)的需求更有望快速起量。
在快速發(fā)展的賽道中,對于應(yīng)用企業(yè)來說,什么樣的激光雷達(dá)方案才是實(shí)現(xiàn)低速無人駕駛的最優(yōu)解?
激光雷達(dá)的三大路線
首先,我們來看看當(dāng)前激光雷達(dá)主要的幾類技術(shù)路線。激光雷達(dá)系統(tǒng)涉及激光光源、接收器件、掃描模式、測距原理等多個(gè)獨(dú)立的維度或子模塊,每個(gè)維度上都有多種潛在的方案選擇。排列組合下來,理論上可行的激光雷達(dá)系統(tǒng)方案甚至可能超過上百種。
激光雷達(dá)分類方式繁多,當(dāng)前業(yè)內(nèi)常用的分類方式是根據(jù)雷達(dá)內(nèi)部有無機(jī)械旋轉(zhuǎn)部件來定義的,主要分為三種類型:機(jī)械式、固態(tài)、混合固態(tài)。
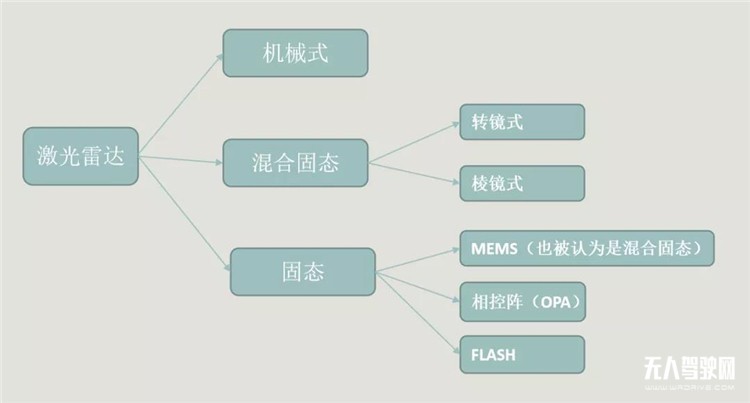
機(jī)械式
機(jī)械式雷達(dá)是指通過電機(jī)帶動(dòng)光機(jī)結(jié)構(gòu)整體旋轉(zhuǎn)的機(jī)械式方案,激光脈沖發(fā)射器、接收器等元器件都會(huì)隨著掃描模塊進(jìn)行 360°旋轉(zhuǎn),從而生成一個(gè)立體點(diǎn)云,實(shí)現(xiàn)對環(huán)境的感知掃描。
機(jī)械式激光雷達(dá)最大的優(yōu)點(diǎn)是可以通過物理旋轉(zhuǎn)進(jìn)行3D掃描,對周遭環(huán)境進(jìn)行全面的覆蓋形成點(diǎn)云,且精度高、工作穩(wěn)定、成像快。但缺點(diǎn)也很明顯,一個(gè)是高頻的轉(zhuǎn)動(dòng)和復(fù)雜的機(jī)械結(jié)構(gòu)致使其壽命相對較短,另一個(gè)是機(jī)械式雷達(dá)掃描線束的提高依賴于激光收發(fā)裝置的堆疊,在成本和體積方面難以控制。
在自動(dòng)駕駛的實(shí)驗(yàn)階段,機(jī)械式雷達(dá)是能夠滿足應(yīng)用端需要的,但伴隨著自動(dòng)駕駛從概念走向現(xiàn)實(shí),要實(shí)現(xiàn)規(guī)模落地應(yīng)用,核心零部件的壽命、成本等問題成為企業(yè)不得不考慮的問題。
固態(tài)式
前進(jìn)的路上遇到攔路石,一般有兩種選擇,要么換一條路,要么搬開石頭。
在激光雷達(dá)領(lǐng)域,隨著傳統(tǒng)機(jī)械式激光雷達(dá)漸漸不能滿足自動(dòng)駕駛規(guī)模落地的需要,更換路線成為大部分企業(yè)的選擇。
固態(tài)激光雷達(dá)開始被認(rèn)為是自動(dòng)駕駛規(guī)模化應(yīng)用的關(guān)鍵。相比機(jī)械式激光雷達(dá),固態(tài)激光雷達(dá)僅面向一個(gè)方向一定角度進(jìn)行掃描,覆蓋范圍有所限制。但取消了復(fù)雜高頻轉(zhuǎn)動(dòng)的機(jī)械結(jié)構(gòu),耐久性得到了巨大的提升,體積也可以大幅縮小。
盡管能夠解決機(jī)械式激光雷達(dá)面臨的一些問題,但固態(tài)式激光雷達(dá)也存在著一些限制。
當(dāng)前的固態(tài)激光雷達(dá)方案主要分為三種:Flash、OPA以及MEMS。
Flash能夠在短時(shí)間內(nèi)直接向前方發(fā)射出一大片覆蓋探測區(qū)域的激光,通過高度靈敏的接收器實(shí)現(xiàn)對環(huán)境周圍圖像的繪制。Flash激光雷達(dá)的原理類似于拍照,但最終生成的數(shù)據(jù)包含了深度等3D數(shù)據(jù)。但是由于短時(shí)間內(nèi)發(fā)射大面積的激光,因此在探測精度和探測距離上會(huì)受到較大的影響,當(dāng)前也無法滿足開放道路自動(dòng)駕駛乘用車的需要。
OPA發(fā)射的是電磁波,同樣也是波的一種,波與波之間會(huì)產(chǎn)生干涉現(xiàn)象。通過控制相控陣?yán)走_(dá)平面陣列各個(gè)陣元的電流相位,利用相位差可以讓不同的位置的波源會(huì)產(chǎn)生干涉,從而指向特定的方向。往復(fù)控制相位差便可以實(shí)現(xiàn)掃描的效果。
但是,OPA激光雷達(dá)要求陣列單元尺寸必須不大于半個(gè)波長,因此每個(gè)器件尺寸僅500nm左右,對材料和工藝的要求都極為苛刻,成本難以控制。上游的供應(yīng)鏈尚未突破,OPA激光雷達(dá)的開發(fā)也存在諸多限制。
MEMS采用二維微振鏡,僅需要少量激光收發(fā)單元,通過一面MEMS微振鏡來反射激光器的光束即可實(shí)現(xiàn)對目標(biāo)物體的3D掃描,對激光器和探測器的數(shù)量需求明顯減少。MEMS 激光雷達(dá)結(jié)構(gòu)原理上減少了絕大部分運(yùn)動(dòng)結(jié)構(gòu),但仍有一丁點(diǎn)可運(yùn)動(dòng)部件,也就是偏振鏡面工作時(shí)候做出的振動(dòng),因此,也有一些人認(rèn)為應(yīng)該將MEMS歸為混合固態(tài)類。
但也有企業(yè)表示,固態(tài)激光雷達(dá)與非固態(tài)激光雷達(dá)的區(qū)分,重點(diǎn)不在于內(nèi)部是否存在運(yùn)動(dòng)部件,而在于結(jié)構(gòu)的可靠性,行業(yè)對于“固態(tài)”的期待,大多源于機(jī)械電機(jī)及軸承不可靠的方面襯托,而MEMS在結(jié)構(gòu)的可靠性方面已經(jīng)無限接近“固態(tài)”了。
當(dāng)然,固態(tài)還是混合固態(tài)其實(shí)并不是關(guān)鍵,關(guān)鍵在于,MEMS方案是否能夠滿足自動(dòng)駕駛的需要。
MEMS的主要優(yōu)勢在于體積小,容易集成,便于整機(jī)盡可能小型化,量產(chǎn)后成本較低……不過 MEMS 也有它的局限性,如有效距離短、FOV窄等。此外,MEMS 器件的核心結(jié)構(gòu)是尺度很小的懸臂梁結(jié)構(gòu),如果芯片設(shè)計(jì)或者器件選型不得當(dāng),會(huì)因?yàn)橥饨绲恼駝?dòng)或者沖擊導(dǎo)致斷裂,對激光雷達(dá)企業(yè)的設(shè)計(jì)和生產(chǎn)能力要求較高。
總體而言,在當(dāng)前的三種固態(tài)方案中,MEMS技術(shù)是最為成熟的,也是業(yè)界和投資界比較看好的,有望最快實(shí)現(xiàn)量產(chǎn)落地。
混合固態(tài)
由于大部分固態(tài)技術(shù)突破及量產(chǎn)的實(shí)現(xiàn)還有很長一段路要走,作為折中方案的混合固態(tài)雷達(dá)開始成為一些廠商的方向。
混合固態(tài)雷達(dá)不需要通過機(jī)械結(jié)構(gòu)來旋轉(zhuǎn)激光發(fā)射器和接收器來進(jìn)行360度掃描,體積比較小,成本也比較低,但是內(nèi)部又有部分小型的機(jī)械運(yùn)動(dòng)部件。目前混合固態(tài)的主要方案有兩種:
轉(zhuǎn)鏡式。轉(zhuǎn)鏡是通過反射鏡面圍繞圓心不斷旋轉(zhuǎn)實(shí)現(xiàn)掃描,轉(zhuǎn)鏡在功耗、散熱等方面有著更大優(yōu)勢。法雷奧推出的全球首款車規(guī)級(jí)激光雷達(dá)就采用了轉(zhuǎn)鏡形式。在轉(zhuǎn)鏡方案中,存在一面掃描鏡(一維轉(zhuǎn)鏡)和一縱一橫兩面掃描鏡(二維轉(zhuǎn)鏡)兩種技術(shù)路線。一維轉(zhuǎn)鏡線束與激光發(fā)生器數(shù)量一致,而二維轉(zhuǎn)鏡可以實(shí)現(xiàn)等效更多的線束,在集成難度和成本控制上存在優(yōu)勢,不過轉(zhuǎn)鏡方案與MEMS一樣存在信噪比低,和有效距離短,F(xiàn)OV視場角受限等問題。
棱鏡式。棱鏡激光雷達(dá)也稱為雙楔形棱鏡激光雷達(dá),內(nèi)部包括兩個(gè)楔形棱鏡,激光在通過第一個(gè)楔形棱鏡后發(fā)生一次偏轉(zhuǎn),通過第二個(gè)楔形棱鏡后再一次發(fā)生偏轉(zhuǎn)。控制兩面棱鏡的相對轉(zhuǎn)速便可以控制激光束的掃描形態(tài)。相比與轉(zhuǎn)鏡方案,棱鏡激光雷達(dá)可以通過增加激光線束和功率實(shí)現(xiàn)更高的精度和更遠(yuǎn)的探測距離,不過機(jī)械結(jié)構(gòu)也相對更加復(fù)雜,體積較前者更難以控制,存在軸承或襯套的磨損等風(fēng)險(xiǎn)。同時(shí)由于非重復(fù)性掃描點(diǎn)云有別于行業(yè)一直以來應(yīng)用的重復(fù)性掃描點(diǎn)云,需要單獨(dú)開發(fā)算法匹配,感知系統(tǒng)開發(fā)成本和周期更高。

不同類型激光雷達(dá)優(yōu)劣勢對比
低速無人駕駛的最優(yōu)解
機(jī)械式、固態(tài)、混合固態(tài)……,哪一種方案才是實(shí)現(xiàn)低速無人駕駛的最優(yōu)解,目前尚未有定論。事實(shí)上,盡管定義為“低速”,但由于應(yīng)用場景多樣復(fù)雜,不同的場景對于傳感器的需求也呈現(xiàn)出不同的特點(diǎn)。
目前,我們所提到的低速無人駕駛一般聚焦于園區(qū)、景區(qū)、礦區(qū)、港口等室外半封閉場景的應(yīng)用,事實(shí)上,室內(nèi)一些清潔服務(wù)機(jī)器人甚至于工業(yè)場景應(yīng)用移動(dòng)機(jī)器人也被看做是低速無人駕駛。(延伸閱讀:一文讀懂移動(dòng)機(jī)器人專用激光雷達(dá))而激光雷達(dá)在低速無人駕駛領(lǐng)域的主要作用有兩個(gè):
1、目標(biāo)檢測
無人車對周圍環(huán)境的準(zhǔn)確感知是保證安全的基礎(chǔ),因此感知數(shù)據(jù)的精度和可靠性十分重要。激光雷達(dá)作為自動(dòng)駕駛目標(biāo)檢測的最重要的傳感器之一,常用于物體檢測、障礙物識(shí)別、道路分割和目標(biāo)關(guān)鍵信息提取。
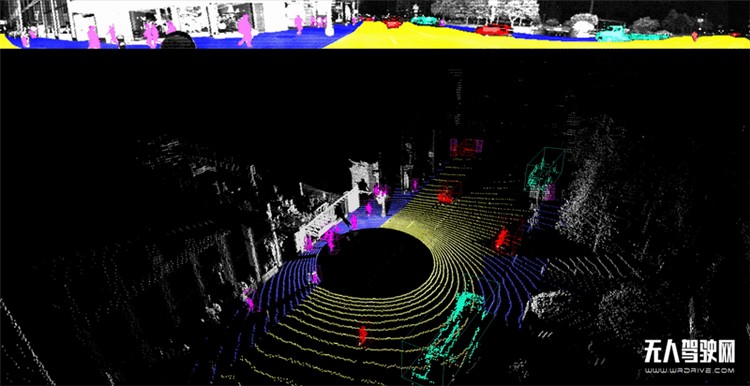
下圖是一個(gè)典型的目標(biāo)檢測效果圖
2、SLAM定位與構(gòu)圖
激光SLAM指搭載激光雷達(dá)的車輛,使用實(shí)時(shí)的激光點(diǎn)云數(shù)據(jù)于運(yùn)動(dòng)中估計(jì)自身的位姿,同時(shí)增量式構(gòu)建周圍的環(huán)境地圖的算法。基于激光雷達(dá)的SLAM就不受光照影響,數(shù)據(jù)量比較小,創(chuàng)建的地圖精度高,而多線激光雷達(dá)還能提供豐富的三維點(diǎn)云數(shù)據(jù),適應(yīng)室外復(fù)雜環(huán)境,因此在低速無人駕駛領(lǐng)域廣受歡迎。
激光SLAM定位與構(gòu)圖過程可分為三個(gè)步驟:首先對激光點(diǎn)云進(jìn)行數(shù)據(jù)處理完成關(guān)鍵特征的提取。其次,根據(jù)幀間的特征匹配完成車體的實(shí)時(shí)位姿估計(jì)并且增量式地構(gòu)建地圖。最終,進(jìn)行地圖的全局優(yōu)化,并結(jié)合高精地圖、IMU等輔助信息優(yōu)化自身的位置、姿態(tài)信息,實(shí)現(xiàn)高精度的地圖構(gòu)建與精準(zhǔn)定位。
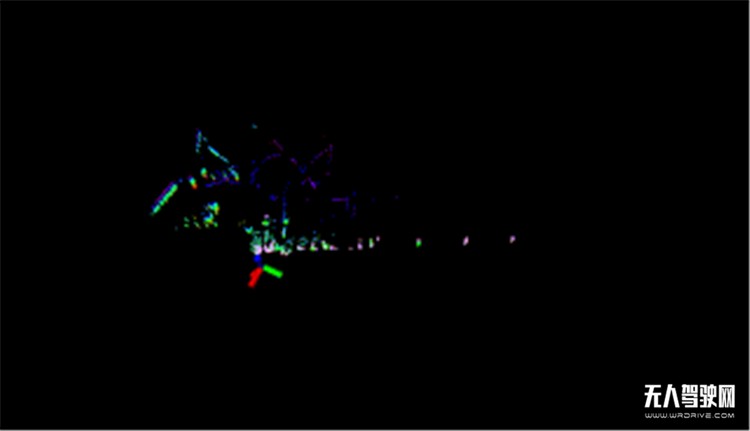
探維Tensor激光雷達(dá)建圖效果
除此之外,障礙物檢測、 可行駛區(qū)域識(shí)別等應(yīng)用也都會(huì)需要用到激光雷達(dá)。
一般而言,室外場景更看重激光雷達(dá)的環(huán)境適應(yīng)能力,比如抗雨霧、抗太陽光、灰塵等影響。室內(nèi)場景,比如商場、火車站、機(jī)場等,更注重的是對透明玻璃或者大大小小的動(dòng)態(tài)物體比如小動(dòng)物或者小的障礙物這些的探測能力。此外,越大型的設(shè)備存在的盲區(qū)也更多,對傳感器方案的配置也有不同的需求。
以下選取了當(dāng)前低速無人駕駛幾個(gè)典型場景的激光雷達(dá)的應(yīng)用現(xiàn)狀。
清潔機(jī)器人
清潔機(jī)器人應(yīng)用場景具體可分為兩大類,室內(nèi)&室外,不同場景也有不同的需求。
以高仙機(jī)器人為例,其相關(guān)產(chǎn)品以3D/2D激光雷達(dá)+攝像頭+超聲傳感器為主的多傳感器融合方案,其系列產(chǎn)品主要可以分為室內(nèi)、外的商用清潔機(jī)器人,與園區(qū)、道路用無人駕駛環(huán)衛(wèi)車兩大板塊,商用清潔機(jī)器人應(yīng)用場景又可以細(xì)分為較為簡單的寫字樓、酒店、商場、廣場、交通樞紐、園區(qū),和較為復(fù)雜的超市、地下車庫、工廠車間等,因地制宜為用戶提供最有效的機(jī)器人清潔服務(wù)。運(yùn)行的環(huán)境不一樣,對激光定位的要求也不一樣,環(huán)境相對簡單的,則以無碰撞安全運(yùn)行為主,傳感器的視距需求不高,但視野需要比較聚焦局部。而對于室外大型的清掃車一般會(huì)搭載3個(gè)及以上的激光雷達(dá)來實(shí)現(xiàn)定位導(dǎo)航及避障。

在雷達(dá)的選用上,目前高仙傾向機(jī)械式多線束雷達(dá),跟速騰聚創(chuàng)合作居多,同時(shí)高仙也在不斷積極探索其他高效前沿的傳感器方案。據(jù)2020年報(bào)道,高仙也與大疆旗下的激光雷達(dá)公司覽沃達(dá)成了合作,覽沃為高仙定制的Mid系列產(chǎn)品采用棱鏡式方案,覽沃方面表示該系列產(chǎn)品點(diǎn)云密度可以達(dá)到20-32線的激光雷達(dá)效果,未來與高仙的合作也將會(huì)持續(xù)擴(kuò)展。
當(dāng)前,高仙在環(huán)衛(wèi)保潔數(shù)字化這條路上走在前沿,以全系列商用清潔機(jī)器人與無人駕駛環(huán)衛(wèi)車為載體,對傳感器方案落地進(jìn)行的一系列探索,也為行業(yè)作出了一定的貢獻(xiàn),頗具參考意義。
無人配送車
從限定區(qū)域的無人清掃到最后一公里無人配送,相對于清潔機(jī)器人而言,無人配送車面臨著更加復(fù)雜的環(huán)境,對感知定位系統(tǒng)的要求也更高。
以美團(tuán)最新一代的魔袋20為例,整車搭載了30余個(gè)傳感器,包括3個(gè)激光雷達(dá)、19個(gè)攝像頭、2個(gè)毫米波雷達(dá)和9個(gè)超聲波雷達(dá)。其中,車頂激光雷達(dá)為禾賽科技Pandar 64,為一顆64線機(jī)械激光雷達(dá),在車前左右兩側(cè)還分別配備了Velodyne的激光雷達(dá),用于補(bǔ)盲。

這種激光雷達(dá)配置方案也是目前市場上大部分無人配送車的選擇,車頂?shù)募す饫走_(dá)用來全局掃描,左右兩個(gè)用來補(bǔ)盲,再與其他傳感器相配合。
無人配送小車對激光雷達(dá)的應(yīng)用依舊是以機(jī)械式方案為主,不過也有一些在嘗試固態(tài)及混合固態(tài)的方案。2018年,阿里菜鳥與速騰聚創(chuàng)(RoboSense)聯(lián)合發(fā)布了全球首款應(yīng)用固態(tài)激光雷達(dá)的無人物流車G Plus,該款物流車搭載了來自速騰聚創(chuàng)的固態(tài)激光雷達(dá)RS-LiDAR-M1Pre,前方兩臺(tái),后方一臺(tái)。京東物流的無人小車也與LIVOX有相關(guān)合作。
但固態(tài)目前來說仍舊只是嘗試性的應(yīng)用,阿里最新一代的物流機(jī)器人“小蠻驢”依舊采用了機(jī)械式的方案,批量搭載了速騰聚創(chuàng)RoboSense為其定制的新一代32線激光雷達(dá)。其他包括京東、新石器、智行者也依舊是以機(jī)械式方案為主。
無人卡車
作為低速無人駕駛領(lǐng)域車型最大的無人卡車,在感知定位方面,則需要更多傳感器的融合。
以斯年智駕的港口無人卡車為例,車上搭載了激光雷達(dá)、相機(jī)、毫米波雷達(dá)、超聲波雷達(dá)等傳感器,其中,作為主傳感器的激光雷達(dá)都是傳統(tǒng)的機(jī)械式方案,一共有4個(gè),左右兩側(cè)和頂上配備高線束激光雷達(dá),一般不低于32線,前方還需要補(bǔ)盲雷達(dá),一般需要16線以上。據(jù)了解,一輛無人卡車整體傳感器硬件成本接近20萬,其中激光雷達(dá)占了70%-80%。

無人駕駛卡車廠商也在嘗試固態(tài)的方案,不過固態(tài)的技術(shù)還并不成熟,首先視野比較受限,要達(dá)到機(jī)械式同樣的掃描效果,需要多個(gè)拼接,且由于卡車本身的空氣懸掛設(shè)計(jì),車體抖動(dòng)劇烈,嚴(yán)重影響到傳感器之間的聯(lián)合標(biāo)定和對齊,所以一些廠商認(rèn)為拼接的方案目前來說并不適用。
踏歌智行和慧拓智能的無人礦卡則選擇了Ouster的數(shù)字激光雷達(dá),所謂「數(shù)字激光雷達(dá)」,就是對激光雷達(dá)進(jìn)行全半導(dǎo)體化的設(shè)計(jì),將原來激光雷達(dá)產(chǎn)品內(nèi)部的發(fā)射器、接收器等上千種光電器件固化到芯片之中,實(shí)現(xiàn)了「固態(tài)」的形式。在此基礎(chǔ)上,Ouster 再在激光雷達(dá)內(nèi)部加入旋轉(zhuǎn)裝置,讓其能夠在 360 度方向上實(shí)現(xiàn)掃描。數(shù)字激光雷達(dá)其實(shí)也可以理解為一種混合固態(tài)的方案,相對于純固態(tài)激光雷達(dá),ouster的數(shù)字激光雷達(dá)方案擴(kuò)大了掃面角度,更適用于大型卡車的感知需要。
機(jī)械式為主,固態(tài)方案逐漸嘗試
可以看出,目前在低速無人駕駛領(lǐng)域,無論是小型的清潔機(jī)器人還是大型的無人卡車,機(jī)械式激光雷達(dá)都是應(yīng)用主流。
盡管各類產(chǎn)品應(yīng)用場景不同,但同處低速領(lǐng)域,也有一些共同的特征。
與開放道路乘用車相比,低速場景的無人駕駛產(chǎn)品對探測距離、探測頻率的要求相對來說較低,對感知距離要求也較低,一般在20-50米之間。因此目前低速場景應(yīng)用的較多的都是低線束及短距離激光雷達(dá),16線是應(yīng)用最多的,其次是32線。
大部分廠商都在嘗試固態(tài)的方案,主要因素之一在于機(jī)械式目前的成本較高。高仙機(jī)器人相關(guān)負(fù)責(zé)人表示盡管激光雷達(dá)的價(jià)格已經(jīng)逐年下降,但對于應(yīng)用端來說更低的價(jià)格始終是最大的關(guān)注點(diǎn)。
另外一點(diǎn)則在于使用壽命。機(jī)械式激光雷達(dá)的工作原理決定了它的壽命,因?yàn)檩S承再好也是有一個(gè)絕對壽命的,長時(shí)間連續(xù)旋轉(zhuǎn)到一定的程度后,再加上溫度的因素,都對機(jī)械式激光雷達(dá)壽命有一點(diǎn)影響,不過伴隨著一些廠商對機(jī)械式方案的不斷改進(jìn),當(dāng)前機(jī)械式產(chǎn)品的使用壽命也在不斷延長。
事實(shí)上,無論是機(jī)械式、固態(tài)還是混合固態(tài),都有各自的優(yōu)點(diǎn)以及尚未突破的難點(diǎn),目前并沒有哪種方案是完美的,當(dāng)然,未來伴隨著技術(shù)的發(fā)展或許當(dāng)前存在某些的問題能逐漸解決,但應(yīng)該也很難出現(xiàn)一個(gè)能解決所有問題的“完美方案”。就像現(xiàn)在一樣,應(yīng)用端們還是要根據(jù)自己的需求去綜合分析,選擇最合適的方案。
當(dāng)前來說,機(jī)械式方案最為成熟,顯然更適用于低速無人駕駛領(lǐng)域,但成本高,壽命受限是目前存在的主要問題。固態(tài)方案尚存在諸多技術(shù)難點(diǎn)有待突破,混合固態(tài)雷達(dá)的應(yīng)用也還不成熟,不過伴隨著乘用車市場的推動(dòng),固態(tài)及混合固態(tài)方案可能會(huì)加速迭代發(fā)展,但當(dāng)前大部分固態(tài)及混合固態(tài)產(chǎn)品針對的都是乘用車市場,未來要想在低速領(lǐng)域得到規(guī)模化應(yīng)用,廠商能否針對這一市場推出適用性產(chǎn)品也是關(guān)鍵。
國產(chǎn)激光雷達(dá)廠商崛起
當(dāng)然,技術(shù)的發(fā)展離不開企業(yè)的推動(dòng),伴隨自動(dòng)駕駛的發(fā)展尤其是低速無人駕駛的逐漸應(yīng)用,這一階段,國內(nèi)外激光雷達(dá)企業(yè)紛紛成立,激光雷達(dá)市場規(guī)模開始爆發(fā),企業(yè)也開始進(jìn)入快速成長期。
這之中,中國的激光雷達(dá)廠商雖然起步較晚,但近幾年,伴隨著中國無人駕駛產(chǎn)業(yè)的快速發(fā)展,在不斷的應(yīng)用打磨中也逐漸成長起來,推進(jìn)著激光雷達(dá)國產(chǎn)化的進(jìn)一步深入。尤其是低速無人駕駛領(lǐng)域,中國的激光雷達(dá)廠商,以無法拒絕的性價(jià)比優(yōu)勢搶占了大量的市場份額。菜鳥、京東、美團(tuán)、新石器、高仙、斯年智駕……都紛紛換上了國產(chǎn)激光雷達(dá)。

表:國內(nèi)部分低速無人駕駛產(chǎn)品激光雷達(dá)應(yīng)用情況(本表粗略統(tǒng)計(jì),如有未完善之處,請指正!)
低速無人駕駛市場正在飛速發(fā)展,瞄準(zhǔn)這一應(yīng)用領(lǐng)域,一些激光雷達(dá)廠商也開辟了專門的產(chǎn)品線。
速騰聚創(chuàng)
RoboSense(速騰聚創(chuàng))成立于2014年,RoboSense總部位于深圳,通過激光雷達(dá)硬件、AI算法與芯片三大核心技術(shù)閉環(huán),為市場提供具有信息理解能力的智能激光雷達(dá)系統(tǒng),產(chǎn)品技術(shù)包括:MEMS與機(jī)械式激光雷達(dá)硬件、硬件融合技術(shù)、AI感知算法等。
2016年速騰聚創(chuàng)發(fā)布了首款用于自動(dòng)駕駛的16線激光雷達(dá)RS-LiDAR-16和32線激光雷達(dá)RS-LiDAR-32,2017年4月,速騰聚創(chuàng)16線激光雷達(dá)RS-LiDAR-16實(shí)現(xiàn)量產(chǎn),陸續(xù)向合作伙伴供貨。于此同時(shí),2016年速騰也開啟了固態(tài)激光雷達(dá)研發(fā)項(xiàng)目。通過不斷迭代升級(jí),MEMS性能不斷完善,今年3月,速騰聚創(chuàng)在國內(nèi)的首條車規(guī)級(jí)固態(tài)激光雷達(dá)產(chǎn)線正式落成。
而針對低速無人駕駛領(lǐng)域,目前速騰主要產(chǎn)品有RS-LiDAR-16、RS-LiDAR-32、RS-Bpearl以及新款大FOV的32線,主要以低線束的機(jī)械式激光雷達(dá)為主。其相關(guān)產(chǎn)品廣泛應(yīng)用到無人物流車、商用清潔機(jī)器人、巡邏機(jī)器人等領(lǐng)域,并與阿里菜鳥、京東物流、蘇寧物流、AutoX、小馬智行、Momanta、元戎啟行等有著深度合作,市場占有率領(lǐng)先。
禾賽科技
禾賽科技2014年成立于上海,禾賽憑借自主研發(fā)的微振鏡和波形加密技術(shù),始終引領(lǐng)傳感器創(chuàng)新的發(fā)展方向。經(jīng)過多年深耕,禾賽在核心元器件、自研芯片、車規(guī)級(jí)生產(chǎn)能力、功能安全、主動(dòng)抗干擾技術(shù)以及基于深度學(xué)習(xí)的激光雷達(dá)感知方面都有深厚的積累。
早在2016年,禾賽科技便前瞻性地開始自主研發(fā)激光雷達(dá),并逐步進(jìn)入無人駕駛激光雷達(dá)領(lǐng)域。深耕行業(yè)多年,先后推出多款產(chǎn)品,包括面向無人駕駛領(lǐng)域的Pandar40、Pandar40P、Pandar64、PandarQT、Pandar40M、Pandar128;與百度Apollo聯(lián)合發(fā)布的多傳感器融合感知套件Pandora;面向高級(jí)輔助駕駛領(lǐng)域的PandarGT;面向車聯(lián)網(wǎng)應(yīng)用的PandarMind;面向機(jī)器人、中低速應(yīng)用等市場的PandarXT等系列產(chǎn)品。

針對中低速場景應(yīng)用的PandarXT是禾賽基于自研芯片打造的中距離激光雷達(dá),是一款32線360°機(jī)械旋轉(zhuǎn)雷達(dá),最遠(yuǎn)測距120m@20%,垂直視場角31°,各線均勻分布,垂直分辨率為1°。探測能力方面,PandarXT在100k Lux陽光下感知80m處10%反射率物體的探測概率超過90%。
探維科技
探維科技團(tuán)隊(duì)從2008年開始布局硬件級(jí)圖像融合的固態(tài)激光雷達(dá)技術(shù),2017年開始專注車載和自動(dòng)駕駛應(yīng)用場景,開發(fā)車規(guī)級(jí)的激光雷達(dá)產(chǎn)品,目前已經(jīng)完成大規(guī)模量產(chǎn)產(chǎn)線的建設(shè),進(jìn)入批量交付階段。值得關(guān)注的是,探維科技是國內(nèi)唯一一家來自清華大學(xué)國家重點(diǎn)實(shí)驗(yàn)室的知識(shí)產(chǎn)權(quán)成果轉(zhuǎn)化團(tuán)隊(duì),在高精度激光測距和芯片化信號(hào)處理領(lǐng)域擁有十多年的研發(fā)經(jīng)驗(yàn)和技術(shù)積累。
探維科技在技術(shù)方案上堅(jiān)持核心器件的陣列化、集成化和芯片化,并基于這一目標(biāo)開發(fā)了激光雷達(dá)的ALS技術(shù)平臺(tái)。ALS技術(shù)平臺(tái)包括陣列化模擬前端、專用并行處理芯片、單軸大視場描掃光學(xué)系統(tǒng)。其優(yōu)勢體現(xiàn)在產(chǎn)品穩(wěn)定性強(qiáng)、量產(chǎn)難度低、靈活性高和迭代速度快四個(gè)方面。

2019年探維科技發(fā)布了16單元產(chǎn)品Tensor,并于業(yè)內(nèi)率先實(shí)現(xiàn)了產(chǎn)品的規(guī)模化量產(chǎn),2021年2月,探維正式開始交付全新高性能混合固態(tài)激光雷達(dá)產(chǎn)品——64單元Scope系列。目前,探維科技激光雷達(dá)已經(jīng)完成大量的客戶測試和驗(yàn)證,應(yīng)用場景覆蓋L3級(jí)乘用車商用車、L4級(jí)低速自動(dòng)駕駛、工業(yè)AGV、無人叉車和車路協(xié)同等領(lǐng)域。在低速無人駕駛領(lǐng)域,Tensor具備明顯的價(jià)格優(yōu)勢和產(chǎn)能優(yōu)勢,自去年量產(chǎn)以來已陸續(xù)完成交付數(shù)千臺(tái)。高線數(shù)的Scope自今年年初正式發(fā)布后已獲多筆意向訂單,并得到了行業(yè)客戶的廣泛認(rèn)可。

北醒光子
北醒光子成立于2015年,總部設(shè)于北京。秉承“做世界上最好的機(jī)器人眼睛”的經(jīng)營理念,北醒不斷將新技術(shù)與應(yīng)用相結(jié)合,輔助客戶探索安全智能行駛和自動(dòng)化領(lǐng)域,快速進(jìn)入“智能”新時(shí)代。
北醒光子激光雷達(dá)現(xiàn)已實(shí)現(xiàn)量產(chǎn),年產(chǎn)能達(dá)到60萬臺(tái)。合作伙伴覆蓋全球超過64個(gè)國家和地區(qū),為智慧軌道交通、智慧民航、智慧航運(yùn)、車路協(xié)同及自動(dòng)駕駛、無人機(jī)、機(jī)器人、物位檢測、安防、IoT等行業(yè)實(shí)現(xiàn)技術(shù)升級(jí)。

在低速無人駕駛領(lǐng)域,其最新一代CE系列激光雷達(dá)主要為低速領(lǐng)域無人車提供主雷達(dá)前向探測功能,量程較近、探測精度高、性價(jià)比高、多模式可配置,并配有TF系列激光雷達(dá)為無人車提供輔助補(bǔ)盲/避障等功能。目前已在園區(qū)和礦區(qū)進(jìn)行了大量應(yīng)用測試,穩(wěn)定運(yùn)行。
除以上列舉的部分企業(yè)外,還有包括鐳神智能、萬集科技、歐鐳激光等企業(yè)也擁有相關(guān)產(chǎn)品。
任何產(chǎn)業(yè)的健康發(fā)展都離不開產(chǎn)業(yè)鏈上下游的協(xié)同,自動(dòng)駕駛的發(fā)展推動(dòng)著激光雷達(dá)的不斷進(jìn)步,激光雷達(dá)技術(shù)的不斷突破也給了自動(dòng)駕駛更多可能性,在低速無人駕駛領(lǐng)域,隨著相關(guān)產(chǎn)品的批量化落地,也將推動(dòng)激光雷達(dá)市場規(guī)模進(jìn)一步擴(kuò)大,激光雷達(dá)整體預(yù)計(jì)也將繼續(xù)呈現(xiàn)高速發(fā)展態(tài)勢。



