所以現(xiàn)在的人對(duì)于新事物的接受能力都很強(qiáng),不會(huì)說(shuō)是新事物就有點(diǎn)排斥或者不信任,非常多的人愿意嘗試新的事物,甚至一部分聰明人在自己創(chuàng)新。就有大學(xué)生發(fā)明了“無(wú)人駕駛”自行車(chē),沒(méi)有人在上邊也能自己走,并且獲得眾多投資!
無(wú)人駕駛這個(gè)名詞很多人都聽(tīng)過(guò),這是目前汽車(chē)領(lǐng)域和科技公司都在大力研究的,不管是谷歌還是百度,目前都稍有成效,雖然不能達(dá)到科幻片里面的效果,但是基本實(shí)現(xiàn)了無(wú)人駕駛的操作,只是在智能上不能完全辨別復(fù)雜的交通,保證安全,只能在路況比較好,各種標(biāo)線(xiàn)等都非常清楚的道路行駛,有一定的局限性。
不過(guò)無(wú)人駕駛是一個(gè)方向,不僅在汽車(chē)上開(kāi)始研究,還有人把眼光看準(zhǔn)了自行車(chē),因?yàn)闀r(shí)代的發(fā)展,大家都追求便利,比較費(fèi)力的自行車(chē)就很少有人作為代步了,但是也并沒(méi)有淘汰。就有一個(gè)歐洲的大學(xué)生,發(fā)明了無(wú)人駕駛自行車(chē),不用人騎也能自己行走,并且獲得了不少的投資。
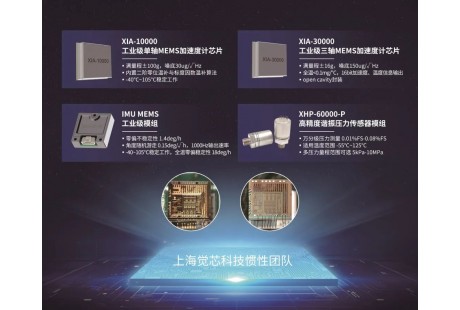
在外觀上還是普通的自行車(chē),只是增加了各種的傳感器還有執(zhí)行模塊,用來(lái)感知路況和判斷。而且內(nèi)部還存儲(chǔ)了一些交規(guī)信息,可以識(shí)別信號(hào)燈和道路信息,然后識(shí)別環(huán)境,根據(jù)編程模塊和數(shù)據(jù)實(shí)現(xiàn)自己導(dǎo)航和行駛,也可以規(guī)避路上的障礙物,這期間是不用人騎在上邊。不過(guò)自行車(chē)和汽車(chē)不同,最先要解決的是平衡的問(wèn)題,它采用了類(lèi)似“不倒翁”的平衡裝置,通過(guò)電子模塊配合,保持平衡。
而且發(fā)明這種自行車(chē)不僅是這個(gè)外國(guó)大學(xué)生,我國(guó)清華大學(xué)的大學(xué)生也早都研發(fā)出這種自行車(chē),并且還獲得了全國(guó)大賽特獎(jiǎng),在測(cè)試中可以繞8字,繞圈,還可以在草地越野等,大部分常用路況都能適應(yīng),也是非常厲害,所以也獲得了大賽的特等獎(jiǎng),真的是為國(guó)爭(zhēng)光。或許這種技術(shù)就很快就能大范圍應(yīng)用,那那些騎自行車(chē)的車(chē)就可以輕松的騎行了。