5月21日,清華大學(xué)車(chē)輛與運(yùn)載學(xué)院2016級(jí)碩士研究生余大蒙(導(dǎo)師為李克強(qiáng)教授)提出的一種基于深度卷積神經(jīng)網(wǎng)絡(luò)的車(chē)載視覺(jué)實(shí)時(shí)聯(lián)合感知模型,在自動(dòng)駕駛領(lǐng)域國(guó)際著名的KITTI目標(biāo)檢測(cè)與朝向估計(jì)(Object Detection and Orientation Estimation)評(píng)測(cè)任務(wù)中,獲得行人類(lèi)別的第一名(1/74),同時(shí)獲得了車(chē)輛類(lèi)別第三名(3/139)。

實(shí)時(shí)聯(lián)合感知模型的目標(biāo)檢測(cè)和朝向估計(jì)效果圖
實(shí)時(shí)聯(lián)合感知模型基于車(chē)載單目視覺(jué),使用單幀圖像作為模型輸入,同時(shí)輸出車(chē)輛、行人和騎車(chē)人等動(dòng)態(tài)目標(biāo)的三維位置、朝向、類(lèi)別和尺寸信息及道路分割結(jié)果。在KITTI行人檢測(cè)與朝向估計(jì)評(píng)測(cè)中,該模型以70.57%的平均朝向相似性(Average Orientation Similarity,用于聯(lián)合評(píng)估檢測(cè)精度與朝向估計(jì)精度的評(píng)價(jià)指標(biāo)),大幅領(lǐng)先第二名67.66%的成績(jī)名列榜首;同時(shí),0.06秒的單幀算法耗時(shí)也大幅低于其他方法。斯坦福大學(xué)、多倫多大學(xué)、馬克斯-普朗克研究所、香港中文大學(xué)等全球多個(gè)國(guó)際頂尖研究團(tuán)隊(duì)參與了這兩項(xiàng)KITTI評(píng)測(cè)任務(wù)的競(jìng)爭(zhēng)。
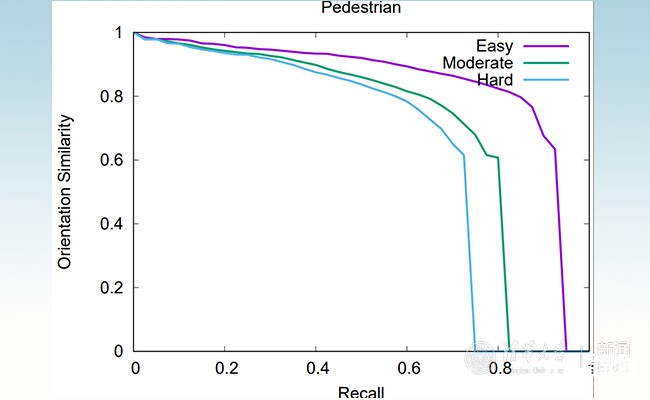
KITTI行人類(lèi)別的朝向相似性-召回率曲線
李克強(qiáng)教授帶領(lǐng)的智能車(chē)輛團(tuán)隊(duì)在智能網(wǎng)聯(lián)汽車(chē)領(lǐng)域已有多年的研究,在該領(lǐng)域頂級(jí)的國(guó)際期刊與國(guó)際會(huì)議發(fā)表了多篇高水平論文,同時(shí)擁有多項(xiàng)相關(guān)發(fā)明專(zhuān)利。團(tuán)隊(duì)圍繞智能網(wǎng)聯(lián)汽車(chē)及新能源汽車(chē),探討人工智能和自動(dòng)控制在下一代汽車(chē)的應(yīng)用,聚焦感知、決策、控制等核心技術(shù)研發(fā),努力提升下一代汽車(chē)的安全、節(jié)能、環(huán)保、舒適等綜合性能。