0 引言
智能無人駕駛汽車是近幾年來新興產(chǎn)物,智能無人駕駛汽車通常是指無人駕駛、自主推進(jìn),由無線電遙控或自身程序控制進(jìn)行自主導(dǎo)航的汽車。智能無人駕駛汽車通常應(yīng)用在科考探險、星球探測、作戰(zhàn)情報搜集等領(lǐng)域中。當(dāng)前服役的智能無人駕駛汽車主要有:MQ-1 Predator “捕食者”、MQ-9 Reaper “收割者”、RQ-4Global Hawk “全球鷹”等。智能無人駕駛汽車由于其設(shè)計(jì)成本低、無人員傷亡風(fēng)險、生存能力強(qiáng)、機(jī)動性能好等特點(diǎn)被廣泛應(yīng)用在軍事領(lǐng)域和科研領(lǐng)域,也是未來汽車制造業(yè)的發(fā)展方向。智能無人駕駛汽車工作環(huán)境惡劣,工作環(huán)境溫度變化異常,比如在極地探險和月球探測等應(yīng)用領(lǐng)域中,工作環(huán)境溫度在零下幾十?dāng)z氏度,發(fā)動機(jī)運(yùn)行狀態(tài)受到環(huán)境溫度的沖擊較大,容易產(chǎn)生故障,研究智能無人駕駛汽車發(fā)動機(jī)的故障檢測優(yōu)化方法,具有重大的實(shí)際價值和意義 [1] 。
傳統(tǒng)方法中對智能無人駕駛汽車發(fā)動機(jī)故障診斷方法采用機(jī)械振動系統(tǒng)信號分析算法,對于智能無人駕駛汽車發(fā)動機(jī)低噪聲、低振動工作條件下故障檢測效果不好。提出一種基于多陣元超聲換能波束指向性分析的智能無人駕駛汽車的發(fā)動機(jī)故障檢測算法。針對傳統(tǒng)方法的缺點(diǎn),進(jìn)行算法改進(jìn),提高對發(fā)動機(jī)的故障檢測性能,系統(tǒng)測試和仿真實(shí)驗(yàn)驗(yàn)證了本文故障檢測算法的優(yōu)越性能。
1 發(fā)動機(jī)故障檢測信號模型構(gòu)建與數(shù)學(xué)模型生成
1.1 發(fā)動機(jī)構(gòu)造與故障檢測研究背景
智能無人駕駛汽車發(fā)動機(jī)故障檢測和診斷的根本原理是通過有效檢測發(fā)動機(jī)的有關(guān)參數(shù)并進(jìn)行信號與信息的處理和分析,實(shí)現(xiàn)對智能無人駕駛汽車發(fā)動機(jī)的運(yùn)行狀況、故障種類、故障原因部位和趨勢的識別和判斷。智能無人駕駛汽車發(fā)動機(jī)屬于高精密儀器 [2-5] ,本文研究的智能無人駕駛汽車發(fā)動機(jī)構(gòu)造結(jié)構(gòu)如圖1所示。該型智能無人駕駛汽車發(fā)動機(jī)屬于精密合金材料制成,制造的難度大價格高,因此需要采用無損檢測的方法進(jìn)行故障檢測 [6] 。而常規(guī)的檢測方式無人駕駛汽車發(fā)動機(jī)監(jiān)測,超聲波檢測以及射線檢測法等手段,不能很好的在現(xiàn)代航空發(fā)動機(jī)的葉片體積小通路復(fù)雜的情況下進(jìn)行較好的故障檢測。
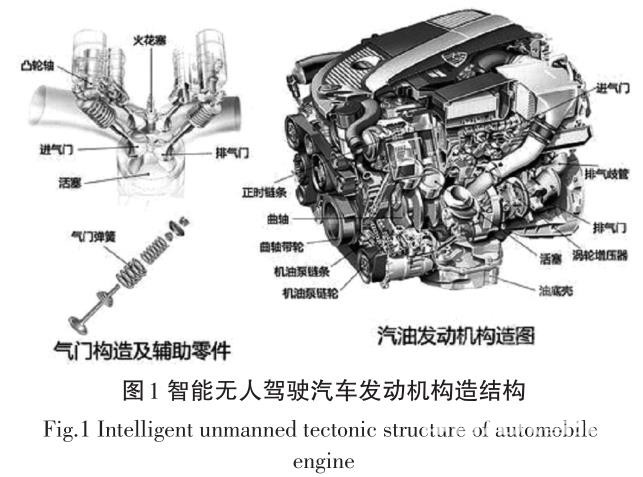
通過整個區(qū)域的紅外亮點(diǎn)分布來判斷是否出現(xiàn)涂層的裂紋或者剝落情況的發(fā)生。航空發(fā)動機(jī)的冷卻通道是在葉片內(nèi)部的通路,通過引入冷卻氣體,使得葉片的溫度不至于過高,而在實(shí)際使用過程中可能會出現(xiàn)通道的堵塞,使得整個葉片的散熱不暢,致使葉片過熱造成整個智能無人駕駛汽車發(fā)動機(jī)空發(fā)動機(jī)出現(xiàn)故障。
1.2 智能無人駕駛汽車發(fā)動機(jī)故障信號模型
通過上述分析和結(jié)構(gòu)模型設(shè)計(jì)可見,對智能無人駕駛汽車發(fā)動機(jī)的故障檢測需要構(gòu)建發(fā)動機(jī)故障信號模型,設(shè)計(jì)有效的發(fā)動機(jī)故障檢測算法。在發(fā)動機(jī)故障特征搜索過程中,最核心的內(nèi)容是搜索發(fā)動機(jī)運(yùn)行特征,并且將這些特征構(gòu)成一個數(shù)據(jù)集合。設(shè)置發(fā)動機(jī)全部特征的數(shù)量能夠用 q 進(jìn)行描述,該集合中元素的數(shù)目能夠用 r 進(jìn)行描述,根據(jù)上述數(shù)據(jù)可以建立一個矩陣,其公式如下所述:
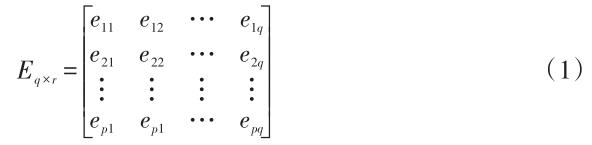
上述矩陣中的每個元素都用來描述發(fā)動機(jī)故障特征的參數(shù),根據(jù)上述矩陣,可以得到無人駕駛汽車發(fā)動機(jī)特征的相關(guān)數(shù)據(jù)。
本文用李普希茲指數(shù)來描述函數(shù)的局部奇異性:
基于多陣元超聲換能波束指向性分析,得到該陣元故障特征表達(dá)式:

利用下述公式可以進(jìn)行智能無人駕駛汽車的發(fā)動機(jī)的故障特征提取:
根據(jù)上面闡述的方法,能夠進(jìn)行無人駕駛汽車發(fā)動機(jī)故障特征提取和信號模型構(gòu)建,從而為故障檢測和挖掘提供依據(jù)。
2 基于多陣元超聲換能波束指向性分析故障檢測算法
在上述模型構(gòu)建的基礎(chǔ)上,本文提出一種基于多陣元超聲換能波束指向性分析故障檢測算法,實(shí)現(xiàn)對故障檢測算法的改進(jìn)。
多陣元超聲換能波束指向性故障特征構(gòu)成的集合可以用 {(zk ,ak ) } 表示,根據(jù)下述公式能夠?qū)ι鲜霭l(fā)動機(jī)故障特征進(jìn)行初始分類:

通過上述算法改進(jìn)設(shè)計(jì),提高了對發(fā)動機(jī)故障檢測性能,最后在提取故障特征的基礎(chǔ)上進(jìn)行專家系統(tǒng)識別和故障分類診斷,最終實(shí)現(xiàn)診斷決策,通過仿真實(shí)驗(yàn)進(jìn)行性能驗(yàn)證。
3 仿真實(shí)驗(yàn)與結(jié)果分析
最后,為了驗(yàn)證本文提出的基于多陣元超聲換能波束指向性分析的智能無人駕駛汽車的發(fā)動機(jī)故障檢測算法的性能,進(jìn)行一次仿真實(shí)驗(yàn)。實(shí)驗(yàn)中,構(gòu)建多陣元超聲換能波束面,構(gòu)建故障檢測診斷系統(tǒng)。采集到的無人駕駛汽車發(fā)動機(jī)故障特征數(shù)據(jù)如圖2所示。
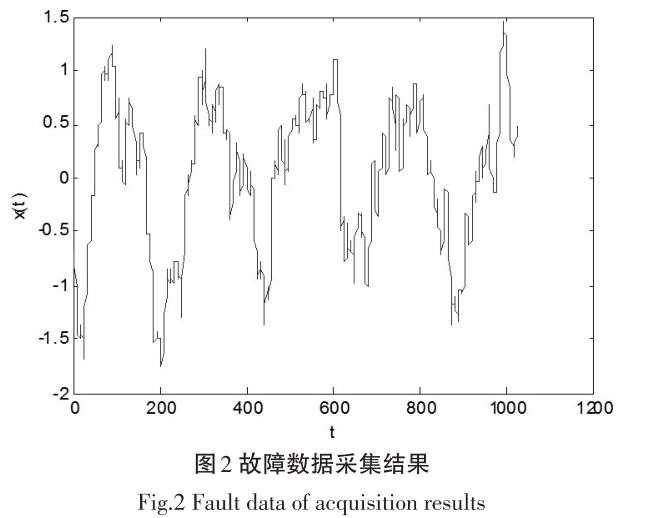
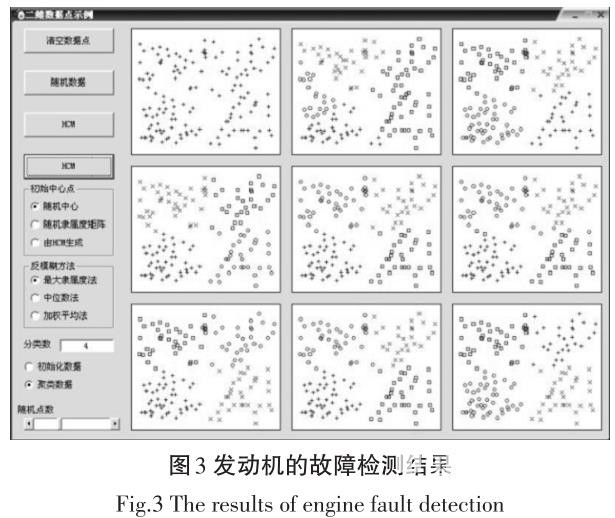
最后在提取故障特征的基礎(chǔ)上進(jìn)行專家系統(tǒng)識別和故障分類診斷,最終實(shí)現(xiàn)診斷決策,進(jìn)而實(shí)現(xiàn)故障檢測數(shù)據(jù)分析,得到發(fā)動機(jī)的故障檢測結(jié)果如圖3所示,從圖3可見,采用本文方法,能準(zhǔn)確實(shí)現(xiàn)對發(fā)動機(jī)各種故障類型的判別和數(shù)據(jù)分析,故障數(shù)據(jù)聚類性能較好,檢測性能較傳統(tǒng)方法提高43%,具有較好的應(yīng)用價值。
4 結(jié)論
通過對智能無人駕駛汽車的發(fā)動機(jī)故障檢測算法的改進(jìn)提高對發(fā)動機(jī)故障的診斷能力。傳統(tǒng)方法中對智能無人駕駛汽車發(fā)動機(jī)故障診斷算法采用機(jī)械振動系統(tǒng)信號分析算法,對于智能無人駕駛汽車發(fā)動機(jī)低噪聲、低振動工作條件下故障檢測效果不好。提出一種基于多陣元超聲換能波束指向性分析的智能無人駕駛汽車的發(fā)動機(jī)故障檢測算法。進(jìn)行發(fā)動機(jī)故障檢測信號模型構(gòu)建,提取多陣元超聲換能波束指向性特征,實(shí)現(xiàn)故障檢測。最后在提取故障特征的基礎(chǔ)上進(jìn)行專家系統(tǒng)識別和故障分類診斷,最終實(shí)現(xiàn)診斷決策。仿真結(jié)果表明,本文算法能準(zhǔn)確實(shí)現(xiàn)對發(fā)動機(jī)故障的診斷和判別,檢測性能提高明顯,展示了較好的應(yīng)用價值。
參考文獻(xiàn):
[1] 繆鵬程,米小兵,張淑儀等.超聲紅外熱像檢測中缺陷發(fā)熱的瞬態(tài)溫度場的有限元分析[J]. 南京大學(xué)學(xué)報(自然科學(xué)), 2005, 41(1):98-104.
[2] 徐子豪,張騰飛.基于語音識別和無線傳感網(wǎng)絡(luò)的智能家居系統(tǒng)設(shè)計(jì)[J].計(jì)算機(jī)測量與控制. 2012, 20(1): 180-182.
[3] Gareth Jones1 and Emma C. Teeling. The evolution of echo?location in bats[J]. TRENDS in Ecology and Evolution.March 2006, 21(3): 149-156.
[4] M Ayub, M H Tiwana, A B Mann. Propagation of Sound in Duct with Mean Flow[J]. Commun Nonlinear Sci Numer Simulat, 2009(14): 3578-3590.
[5] 張曉戎,王程成,胡光波,等.混沌差分優(yōu)化數(shù)據(jù)聚類及在故障診斷中的應(yīng)用[J].壓縮機(jī)技術(shù),2013, 6: 16-20.
[6] 袁永,段奇智,張毅,等.油井?dāng)?shù)據(jù)采集及高效DLL函數(shù)數(shù)據(jù)傳輸性能實(shí)現(xiàn)[J].計(jì)算機(jī)與數(shù)字工程,2013, 41(10):1628-1631.