目前,自動駕駛領(lǐng)域已經(jīng)出現(xiàn)很多數(shù)據(jù)集,例如 KITTI、Oxford、Cityscape、nuScenes、BDD100K 等。
但在自動駕駛創(chuàng)業(yè)公司代表 Waymo 看來,到了 2019 年,KITTI 這樣的數(shù)據(jù)集已經(jīng)太小了,在使用過程中需要大量的時間做數(shù)據(jù)增強、防止過擬合,算法結(jié)果也不能很好地泛化到更大數(shù)據(jù)集上。
因此,在 CVPR 2019 現(xiàn)場,Waymo 首席科學家 Drago Anguelov 發(fā)布了包含完整傳感器信息的全新標注數(shù)據(jù)集 Waymo Open Dataset,它與 KITTI、NuScenes 等數(shù)據(jù)集的對比數(shù)據(jù)如下,在傳感器配置、數(shù)據(jù)集大小上都有很大的提升。
Waymo 數(shù)據(jù)集的傳感器包含 5 個激光雷達、5 個攝像頭,激光雷達和攝像頭的同步效果也更好。
更重要的是,Waymo 數(shù)據(jù)集包含 3000 段駕駛記錄,時長共 16.7 小時,平均每段長度約為 20 秒。整個數(shù)據(jù)集一共包含 60 萬幀,共有大約 2500 萬 3D 邊界框、2200 萬 2D 邊界框。
此外,在數(shù)據(jù)集多樣性上,Waymo Open Dataset 也有很大的提升,該數(shù)據(jù)集涵蓋不同的天氣條件,白天、夜晚不同的時間段,市中心、郊區(qū)不同地點,行人、自行車等不同道路對象,等等。
Drago Anguelov 介紹說,Waymo 將在 7 月份發(fā)布 1K 數(shù)據(jù)集,且將在近期公布數(shù)據(jù)集基準并組織競賽。
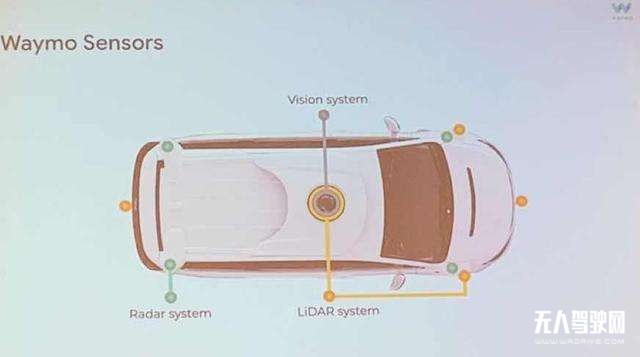
除了發(fā)布數(shù)據(jù)集,此次演講也透露了 Waymo 的傳感器配置,如下圖所示,包括視覺系統(tǒng)、激光雷達系統(tǒng)和雷達系統(tǒng)。
目前,Waymo Open Dataset 尚未公開,但官網(wǎng)已經(jīng)開始注冊,感興趣的讀者可從以下鏈接注冊郵箱。只要數(shù)據(jù)開放,注冊用戶就能收到通知。